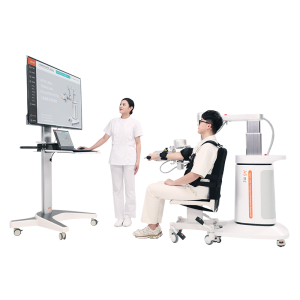


Que é unha robótica de adestramento de marcha?
A robótica de adestramento e avaliación da marcha éun dispositivo para adestramento de rehabilitación para a disfunción da marcha.Adopta un sistema de control informático e un dispositivo de corrección da marcha para permitir o adestramento da marcha.Facendoos pacientes fortalecen a súa memoria de marcha normal con adestramento de marcha repetida e de traxectoria fixa baixo a posición estéreo recta.Co robot de marcha, os pacientes podenrestablecer as súas áreas de función de camiñar no seu cerebro, establece o modo de andar correcto.Ademais, o robot de forma eficazexercicios camiñando relacionados músculos e articulacións, que é excelente para a rehabilitación.
A robótica de adestramento da marcha é axeitada para a rehabilitación da discapacidade da marcha causada por danos no sistema nervioso, como accidentes cerebrovasculares (infarto cerebral, hemorraxia cerebral).Canto antes comece o paciente o adestramento da marcha, menor será a duración da rehabilitación.
Cal é o efecto terapéutico da robótica de adestramento da marcha?
1, retoma o modo de marcha normal durante o adestramento de camiñada temperá;
2, inhibir e aliviar eficazmente os espasmos e mellorar a mobilidade articular;
3, soporte de peso dinámico, mellorar a entrada propioceptiva, manter e mellorar a forza muscular.
Que características ten o robot de adestramento da marcha?
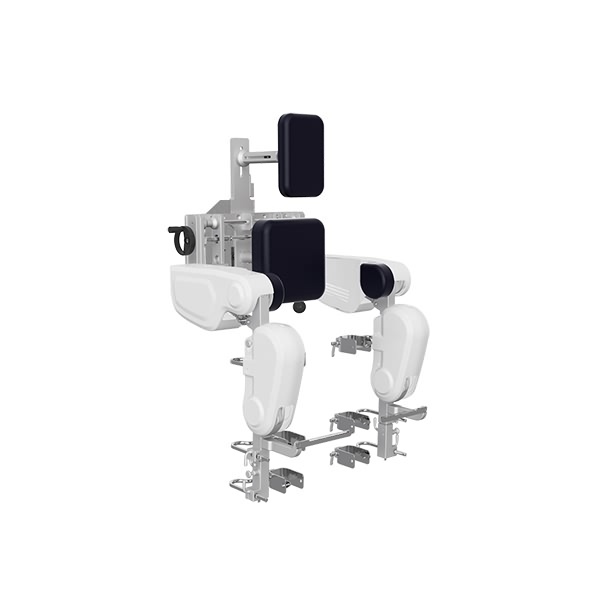
1, Deseño segundo o ciclo de marcha normal;
2, servomotores importados: controla con precisión o ángulo de movemento da articulación e a velocidade de marcha;
3, modos de adestramento activo e pasivo;
4, a forza de guiado é suave e axustable;
5, Realice a corrección da marcha hábitos de marcha anormais mediante a compensación da marcha;
6, detección de espasmos e protección;
7, o sistema de suspensión ten dous modos de apoio: Soporte estático: axeitado para a elevación e aterraxe verticais, facilitando o traslado dos pacientes da cadeira de rodas ao estado de pé.Soporte dinámico: axuste dinámico do centro de gravidade do corpo no ciclo da marcha.
8, cinta de correr patente- A velocidade da cinta de correr e do corrector de marcha sincronízanse automaticamente;A velocidade máis baixa é de 0,1 km/h, axeitado para a formación de rehabilitación temperá;A cinta pode funcionar como un almofada queprotexe os xeonllos e os ligamentos dos pacientes.
9, adestramento de retroalimentación da escena virtual- potenciar o entusiasmo do adestramento, reducir o tratamento aburrido epromover o proceso de recuperación dos pacientes.
10, software - establecer a base de datos dos pacientes para rexistrar a información do tratamento e os plans de tratamento;O plan de tratamento é axustable para conseguir un control preciso e unha recuperación precisa;Mostra a curva de resistencia das pernas do paciente en tempo real;Monitorización en tempo realde adestramento activo e pasivo das pernas, controlando a situación da forza activa do paciente.
Durante as últimas décadas, estivemos a desenvolver moitos equipos de rehabilitación, incluíndofisioterapiaerobots de rehabilitación.Busca o que é máis útil para ti e non dubides en faceloenviar unha mensaxe de contacto.