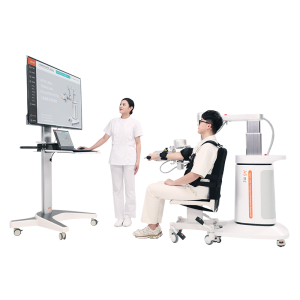


Kio Estas Gait Training Robotics?
La paŝadtrejnado kaj taksa robotiko estasaparato por rehabilita trejnado por marŝa misfunkcio.Ĝi adoptas komputilan kontrolsistemon kaj paŝadkorektan aparaton por ebligi paŝadtrejnadon.Farantepacientoj plifortigas sian normalan paŝadmemoron kun ripeto kaj fiksa trajektoria paŝadtrejnado sub la rekta stereopozicio.Kun paŝroboto, pacientoj povasrestarigi iliajn marŝajn funkciojn en siaj cerboj, starigu la ĝustan marŝreĝimon.Kio estas pli, la roboto efikeekzercoj marŝante rilatajn muskolojn kaj artikojn, kiu estas bonega por rehabilitado.
La paŝtrejnada robotiko taŭgas por rehabilitado de marŝmalkapablo kaŭzita de nerva sistemo damaĝo kiel apopleksio (cerba infarkto, cerba hemoragio).Ju pli frue la paciento komencas paŝadtrejnadon, des pli mallonga estos la rehabilita daŭro.
Kio estas la Terapia Efekto de la Gait Training Robotics?
1, rekomencu la normalan marŝan reĝimon dum frua marŝa trejnado;
2, efike malhelpi kaj malpezigi spasmojn kaj plibonigi artikan moveblecon;
3, dinamika pezo-subteno, plibonigas la proprioceptivan enigon, konservas kaj plibonigas muskolajn fortojn.
Kiajn Trajtojn Havas la Gait Training Roboto?
1, Dezajnu laŭ la normala paŝadciklo;
2, Importitaj servomotoroj - precize kontrolas la komunan movadan angulon kaj marŝrapidecon;
3, Aktivaj kaj pasivaj trejnaj reĝimoj;
4, La gvida forto estas mola kaj ĝustigebla;
5, Faru paŝadkorektadon eksternormaj paŝadkutimoj per paŝad-offseto;
6, spasmo-detekto kaj protekto;
7, penda sistemo havas du subtenajn reĝimojn: Statika subteno: taŭga por vertikala levado kaj surteriĝo, faciligante translokigi pacientojn de rulseĝo al la staranta stato.Dinamika subteno: dinamika alĝustigo de la pezocentro de la korpo en la iradciklo.
8, patenta tretmuelilo- La rapido de la paŝrado kaj la paŝadkorektilo estas aŭtomate sinkronigitaj;La plej malalta rapido estas 0,1 km/h, taŭga por frua rehabilita trejnado;La tretmuelejo povas funkcii kiel kuseno tioprotektas la genuojn kaj ligamentojn de pacientoj.
9, virtuala scena retrotrejnado- plibonigi la entuziasmon de trejnado, redukti la enuigan traktadon, kajantaŭenigi la resaniĝon de pacientoj.
10, softvaro - establi datumbazon de pacientoj por registri traktadajn informojn kaj kuracajn planojn;La traktada plano estas alĝustigebla por atingi precizan kontrolon kaj precizan reakiron;Montru la krurrezistan kurbon de la paciento en reala tempo;Realtempa monitoradode kruro aktiva kaj pasiva trejnado, monitorante la aktiva forto situacio de la paciento.
Dum la pasintaj jardekoj, ni disvolvis multajn rehabilitajn ekipaĵojn inkluzivefizika terapiokajrehabilitaj robotoj.Trovu kio estas la plej utila por vi, kaj bonvolusendu kontaktan mesaĝon.