






Ttaastusravi areng on viimase 30 aasta jooksul hüppeliselt edenenud.Kaasaegne taastusravi teooria täieneb pidevalt, samuti täienevad pidevalt taastusravi ennetamise, hindamise ja ravi tehnoloogiad.Seotud mõisted tungivad järk-järgult erinevatesse kliinilistesse distsipliinidesse ja isegi inimeste igapäevaellu.Eelkõige rahvastiku vananemise trend kogu maailmas suurendab veelgi nõudlust taastusravi järele.Isiku sotsiaalses ja igapäevaelus osalemise ja lõpetamise olulise funktsioonina on käefunktsioon saanud palju tähelepanu ka selle düsfunktsioonile ja sellega seotud rehabilitatsioonile.
TErinevatest põhjustest põhjustatud käte düsfunktsiooni juhtude arv kasvab ning käte tõhus taastumine on patsientide ühiskonda naasmise aluseks.Käte düsfunktsiooni peamised kliiniliselt olulised haigused on jagatud kolme põhikategooriasse.Esimene on traumast põhjustatud haigused, nagu tavalised luumurrud, kõõluste vigastused, põletused ja muud haigused;teine on liigesepõletik, kõõluste ümbrise põletik, müofastsiaalne valusündroom ja muud põletikust põhjustatud haigused;esineb ka mõningaid erihaigusi, nagu kaasasündinud ülajäsemete defektid, neuromuskulaarsed kontrollihäired, diabeedist põhjustatud närvikahjustused, primaarne müopaatia või lihaste atroofia.Seetõttu on käte funktsioonide taastamine keha üldise rehabilitatsiooni oluline osa.
TKäefunktsiooni taastusravi põhimõte on taastada võimalikult palju haigustest või vigastustest põhjustatud käe või ülajäseme motoorseid häireid.Käe taastamiseks on vaja koostööd professionaalse ravimeeskonnaga, kuhu kuuluvad ortopeedid, PT terapeut, OT terapeut, psühhoterapeut ja ortopeediaseadmete insenerid.Professionaalne ravimeeskond suudab pakkuda patsientidele mitmesugust vaimset, sotsiaalset ja tööalast tuge, mis on tõhusa taastumise ja sotsiaalse taasintegreerimise aluseks.
SStatistika näitab, et traditsioonilise ravi abil saab ainult umbes 15% patsientidest pärast insulti taastada 50% oma käefunktsioonist ja ainult 3% patsientidest suudab taastada rohkem kui 70% oma esialgsest käefunktsioonist.Tõhusamate taastusravi meetodite uurimine patsiendi kätefunktsiooni taastusravi parandamiseks on taastusravi valdkonnas muutunud kuumaks teemaks.Praeguseks on peamiselt ülesandekesksele treeningule keskendunud käefunktsiooni taastusrobotid muutunud järk-järgult asendamatuks taastusravi tehnoloogiaks käte funktsioonide taastusravis, tuues kaasa uusi ideid insuldijärgse käefunktsiooni taastamiseks.
Käefunktsiooni taastav roboton aktiivselt juhitav mehaaniline ajam, mis on kinnitatud inimese käe külge.See koosneb viiest sõrmekomponendist ja peopesa toetavast platvormist.Sõrmekomponendid kasutavad 4-baarilist ühendusmehhanismi ja iga sõrme komponenti juhib sõltumatu miniatuurne lineaarmootor, mis võib juhtida iga sõrme painutamist ja sirutamist.Mehaaniline käsi kinnitatakse käe külge kindaga.See võib suunata sõrmi sünkroonselt liikuma ning sõrmi ja robot-eksoskeletti tajutakse ja interaktiivselt juhitakse rehabilitatsiooni hindamise ja koolituse käigus.Esiteks võib see aidata patsiente korduvate sõrmede taastuskoolitustega.Selle protsessi käigus saab käe eksoskelett juhtida sõrmi erineva vabadusastmega liigutusi läbi erinevate juhtimisrežiimide, et saavutada taastuskoolituse eesmärk.Lisaks suudab see koguda ka terve käe elektrilisi signaale, kui see liigub.Elektrilise juhtimissüsteemi liikumismustri tuvastamise kaudu saab see analüüsida terve käe žeste ja juhtida eksoskeletti, et aidata kahjustatud käel sama liigutust teha, et mõista käte sünkroniseerimise ja sümmeetria treenimine.
In ravimeetodite ja mõjude poolest erineb käte taastusravi robotitreening oluliselt traditsioonilisest taastusravist.Traditsiooniline taastusravi keskendub peamiselt passiivsetele tegevustele kahjustatud jäsemetele lõtva halvatuse perioodil, millel on puudused, nagu patsientide vähene aktiivne osalemine ja monotoonne treeningrežiim.Käe eksoskeleti robot abistab kahepoolse sümmeetria treeningut ja peegelteraapia taastusravi koolitust.Integreerides nägemise, puudutuse ja propriotseptsiooni positiivse tagasiside, saab treeningprotsessi käigus tugevdada patsiendi aktiivset motoorset juhtimisvõimet.Tuues patsiendi aktiivse osalemise käefunktsiooni taastusravis lõtvunud perioodile, saab ravis realiseerida motoorsete kavatsuste, motoorsete teostuste ja motoorsete tunnetuste sünkroniseerimist ning korduva stimulatsiooni ja positiivse tagasiside abil saab keskust täielikult aktiveerida.See on tõhus käte funktsioonide taastamise treeningmeetod hemipleegia korral.See kombineeritud taastusravi meetod võib insuldihaigetel märkimisväärselt kiirendada käte funktsioonide taastumisprotsessi ja on silmapaistev eelised käte funktsioonide taastamisel pärast insulti.
TKäefunktsiooni taastusravi robotsüsteem on välja töötatud taastusmeditsiini teooriale tuginedes ja selle taastusravi ettekirjutustes on palju tunnuseid.Raviprotsessi käigus simuleerib süsteem käe liikumise seaduspärasusi reaalajas.Iga sõrme sõltumatu ajamanduri abil saab see teostada mitmesuguseid treeninguid erinevatel eesmärkidel, näiteks ühe sõrmega, mitme sõrmega, täissõrmega, ranne, sõrme ja randmega jne, ning seega saab käefunktsioonide täpset juhtimist. realiseerida.Lisaks viiakse EMG signaali täpne hindamine läbi erineva lihasjõuga patsientidel, et valida patsiendile suunatud treeningmeetod.Hindamisandmeid ja treeninguandmeid saab salvestada salvestamiseks ja analüüsimiseks ning süsteemi saab ühendada internetiga reaalajas 5G meditsiinilise ühenduvuse jaoks.Süsteem on varustatud ka erinevate treeningrežiimidega nagu passiivne treening, aktiivne-passiivne treening, aktiivne treening ning vastava treeningu saab valida vastavalt patsientide erinevale lihasjõule.


Algne pöidla EMG hindamine ja nelja sõrme EMG hindamine on üks viise, kuidas saada patsiendi bioloogilise kehaehituse signaal, analüüsida kehaehituse signaaliga esindatud liikumiskavatsust ja seejärel viia lõpule eksoskeleti taastusravi käe kontroll, et viia läbi taastusravi.
Lihaskontraktsioonidest tekkivad potentsiaalsed muutused tuvastatakse kehapinnalt ning pärast signaali võimendamist ja filtreerimist mürasignaali kõrvaldamiseks teisendatakse, esitatakse ja salvestatakse arvutisse digitaalsed signaalid.
Pinna EMG-signaalil on hea reaalajas jõudlus, tugev bioonika, mugav töö ja lihtne juhtimine, mis tähendab, et see suudab hinnata jäsemete liikumisrežiimi vastavalt inimkeha pinna EMG-le.
APaljude kliiniliste katsete kohaselt on see toode kasutatav peamiselt närvisüsteemi kahjustusest, nagu insult (ajuinfarkt, ajuverejooks) põhjustatud käte düsfunktsiooni taastusravis.Mida varem patsient alustab treenides A5 süsteemiga, seda parem on funktsionaalse taastumise efekt.Mõned uuringutulemused on toodud alloleval joonisel.
(pilt 1: kliiniline uuring pealkirjagaEMG-käivitatud robotkäe mõju käte funktsioonide rehabilitatsioonile varajase insuldi haigetel)
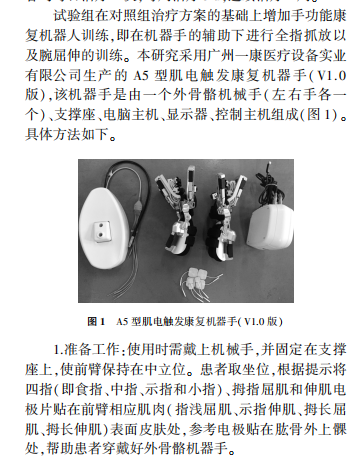
(pilt 2: Kliinilises uuringus kasutati Yeecon Hand Rehabilitation System A5)
Nende uuringute tulemused näitavad, et elektromüograafiaga käivitatud taastusravi robotkäsi võib parandada insuldihaigete käte motoorset funktsiooni.Sellel on teatav võrdlusväärtus varajase insuldihaigete käte funktsioonide taastamisel.
Ettevõtte profiil
GuangzhouYikang MedicalEquipment Industrial Co., Ltd. asutati 2000. aastal. Tegemist on kõrgtehnoloogilise ettevõttega ja kvaliteetse intelligentse taastusravi meditsiiniteenuse pakkujaga, mis ühendab teadus- ja arendustegevuse, tootmise, müügi ja müügijärgse teeninduse.Missiooniga "aidata patsientidel saavutada õnnelik elu" ja visiooniga "intelligentsus muudab taastusravi lihtsamaks", on Yikang Medical otsustanud saada Hiina intelligentse taastusravi valdkonna liidriks ja aidata kaasa kodumaa taastusravitööstusele.
Alates selle asutamisest 2000. aastal on Yikang Medical läbinud 20 aastat tõuse ja mõõnasid.2006. aastal asutati aR&Dkeskus, mis keskendub kõrgetasemeliste taastusravitoodete uurimisele ja arendamisele.2008. aastal oli Yikang Medical esimene ettevõte, kes pakkus Hiinas välja intelligentse taastusravi kontseptsiooni.See on uus ajastu kodumaiste intelligentsete taastusravitoodete arendamiseks ja samal aastal tõi ta Hiinas turule esimese intelligentse taastusravi roboti A1.Sellest ajast alates on see käivitanud mitmeidAseeria intelligentsed taastusravitooted.2013. aastal hinnati Yikang Medical riiklikuks kõrgtehnoloogiliseks ettevõtteks ja traditsioonilise hiina meditsiini diagnostika- ja raviseadmete tootmise riikliku demonstratsioonibaasi ehitusüksuseks.2018. aastal hinnati seda Hiina Rehabilitatsioonimeditsiini Seltsi vanemaks liikmeks ja CARM Rehabilitation Robot Alliance'i sponsoriks.2019. aastal pälvis Yikang riikliku teaduse ja tehnoloogia progressi auhinna teise preemia, osales kolmes riiklikus võtmetähtsa teadusliku uurimistöö projektis ja osales 13. viie aasta plaani kohustusliku ainekava koostamises.
10. jaanuaril 2020 astus Hiina Rahvavabariigi presidentHärra.Xi Jinping andis auhindu Yikang Medicalile, Fujiani Traditsioonilise Hiina Meditsiini Ülikoolile, Hongkongi Polütehnilisele Ülikoolile ja teistele üksustele traditsioonilise Hiina ja Lääne meditsiini integreeritud taastusravi võtmetehnoloogia ja kliinilise rakendamise projekti eest insuldijärgse düsfunktsiooni korral. Inimesed.
Yikang Medical jääb truuks algsele püüdlusele, peab alati meeles oma vastutust intelligentse taastusravi juhtiva ettevõttena ning viib eriprojektis „Proactive Health and Aging Technology Response” läbi kolm peamist riiklikku uurimis- ja arendusprojekti, mis hõlmavad häälitsus- ja kõnehäirete taastusravi koolitust. süsteem, jäsemete motoorsete düsfunktsioonide taastusravi koolitussüsteem ja inimese seljaaju vigastuste robot.

Loe rohkem:
Varajase käte taastamise vajadus
Mis on rehabilitatsioonirobot?
Käte funktsioonide koolitus- ja hindamissüsteem
Postitusaeg: 21. juuni 2022