






The development of rehabilitation medicine has advanced by leaps and bounds over the past 30 years. The modern rehabilitation theory is constantly being improved, and the technologies of rehabilitation prevention, assessment and treatment are also constantly improving. The related concepts are gradually penetrated into various clinical disciplines and even people’s daily life. The trend of population aging around the world, in particular, is further increasing the demand for rehabilitation. As an important function of a person’s participation and completion in social and daily life, hand function has also received a lot of attention to its dysfunction and related rehabilitation.
The number of hand dysfunction cases caused by various reasons is increasing, and effective hand function recovery is the foundation for patients to return to society. The main clinically relevant diseases for hand dysfunction are divided into three main categories. The first is diseases caused by trauma, such as common fractures, tendon injuries, burns and other diseases; the second is joint inflammation, tendon sheath inflammation, myofascial pain syndrome and other diseases caused by inflammation; there are also some special diseases such as congenital upper extremity defects, neuromuscular control disorders, nerve damage caused by diabetes, primary myopathy or muscle atrophy. Therefore, the rehabilitation of hand function is an important part of the overall rehabilitation of the body.
The principle of hand function rehabilitation is to restore the motor dysfunction of the hand or upper extremity caused by diseases or injuries as much as possible. Rehabilitation of the hand requires the cooperation of a professional treatment team consisting of orthopedic physicians, PT therapists, OT therapists, psychotherapists, and orthopedic device engineers. A professional treatment team can provide patients with a variety of spiritual, social and occupational supports, which are the basis for effective recovery and social reintegration.
Statistics shows that through traditional treatment, only about 15% of patients can recover 50% of their hand function after stroke, and only 3% of patients can recover more than 70% of their original hand function. Exploring more effective rehabilitation treatment methods to improve the patient’s hand function rehabilitation has become a heated topic in the rehabilitation field. At present, hand function rehabilitation robots that mainly focus on task-oriented training have gradually become an indispensable rehabilitation treatment technology for hand function rehabilitation, bringing new ideas for the rehabilitation of hand function after stroke.
The hand function rehabilitation robot is an actively controlled mechanical drive system fixed on the human hand. It consists of 5 finger components and a palm supporting platform. The finger components adopt a 4-bar linkage mechanism, and each finger component is driven by an independent miniature linear motor, which can drive the flexion and extension of each finger. The mechanical hand is secured to the hand with a glove. It can drive the fingers to move synchronously, and fingers and robotic exoskeleton are mutually perceived and interactively controlled in the process of rehabilitation evaluation and training. First, it can assist patients with repetitive finger rehabilitation training. During this process, the hand exoskeleton can drive the fingers to complete movements of different degrees of freedom through different control modes to achieve the purpose of rehabilitation training. In addition, it can also collect the electrical signals of the healthy hand when it is in motion. Through the motion pattern recognition of the electric control system, it can analyze the gestures of the healthy hand, and drive the exoskeleton to assist the affected hand to complete the same movement, so as to realize the synchronization and symmetry training of the hands.
In terms of treatment methods and effects, hand rehabilitation robot training is significantly different from traditional rehabilitation training. Traditional rehabilitation therapy mainly focuses on passive activities for the affected limbs in the flaccid paralysis period, which has shortcomings such as low active participation of patients and monotonous training mode. Hand exoskeleton robot assists in bilateral symmetry training and mirror therapy rehabilitation training. By integrating the positive feedback of vision, touch and proprioception, patient’s active motor control ability can be strengthened during the training process. Bringing forward patient’s active participation in hand function rehabilitation to the flaccid period, the synchronization of motor intention, motor execution and motor sensation can be realized in the treatment, and the center can be fully activated through repeated stimulation and positive feedback. It is an efficient hand function rehabilitation training method for hemiplegia. This composite rehabilitation treatment method can significantly accelerate the recovery process of hand function in stroke patients, and has prominent advantages in the rehabilitation of hand function after stroke.
The hand function rehabilitation robot system is developed based on the theory of rehabilitation medicine, and has many characteristics in its prescriptions of rehabilitation treatment. During the treatment process, the system simulates hand movement laws in real time. Through the independent drive sensor of each finger, it can realize a variety of training for different purposes such as single finger, multi-finger, full-finger, wrist, finger and wrist, etc., and thus the precise control of hand functions can be realized. Moreover, accurate evaluation of EMG signal is carried out for patients with different muscle strength so as to select targeted training method for the patient. Evaluation data and training data can be recorded for storage and analysis, and the system can be connected to internet for real-time 5G medical interconnection. The system is also equipped with a variety of training modes such as passive training, active-passive training, active training, and the corresponding training can be selected according to the different muscle strength of patients.


The original thumb EMG evaluation and four finger EMG evaluation are one way to obtain the patient’s biological physique signal, analyze the movement intention represented by the physique signal, and then complete the control of the exoskeleton rehabilitation hand to realize rehabilitation training.
The potential changes generated by muscle contractions are detected from the body surface, and after signal amplification and filtering to eliminate noise signal, digital signals are converted, presented and recorded in the computer.
The surface EMG signal has the characteristics of good real-time performance, strong bionics nature, convenient operation and easy control, which means that it can judge the movement mode of limbs according to the surface EMG of human body.
According to many clinical experiments, this product is mainly applicable to the rehabilitation treatment of hand dysfunction caused by nervous system damage such as stroke (cerebral infarction, cerebral hemorrhage). The earlier the patient starts training with A5 system, the better the functional recovery effect can be obtained. Some of the research results are shown in the figure below.
(picture 1: clinical study titled Effect of EMG-Triggered Robotic Hand on Hand Function Rehabilitation in Early Stroke Patients)
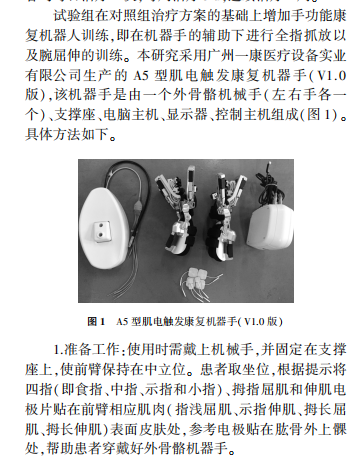
(picture 2: Yeecon Hand Rehabilitation System A5 was used for the clinical study)
The results of these studies show that the electromyography-triggered rehabilitation robotic hand can improve hand motor function of stroke patients. It has certain reference significance for the rehabilitation of hand function in early stroke patients.
Company Profile
Guangzhou Yikang Medical Equipment Industrial Co., Ltd. was established in 2000. It is a high-tech enterprise and a high-quality intelligent rehabilitation medical service provider integrating R&D, production, sales and after-sales service. With the mission of ‘help patients to achieve a happy life’, and the vision of ‘intelligence makes rehabilitation easier’, Yikang Medical is determined to become a leader in intelligent rehabilitation field in China and contribute to the rehabilitation industry of the motherland.
Since its establishment in 2000, Yikang Medical has gone through 20 years of ups and downs. In 2006, it established a R&D center, focusing on the research and development of high-end rehabilitation products. In 2008, Yikang Medical was the first company to propose the concept of intelligent rehabilitation in China. It is a new era for the development of domestic intelligent rehabilitation products, and in the same year, it launched the first intelligent rehabilitation robot A1 in China. Since then, it has launched a number of A series intelligent rehabilitation products. In 2013, Yikang Medical was rated as a national high-tech enterprise and a construction unit of a national demonstration base for production of traditional Chinese medicine diagnosis and treatment equipment. In 2018, it was rated as a senior member unit of the Chinese Society of Rehabilitation Medicine and a sponsor of the CARM Rehabilitation Robot Alliance. In 2019, Yikang won the second prize of the National Science and Technology Progress Award, took part in three national key scientific research projects, and participated in the compilation of the compulsory syllabus of the 13th Five-Year Plan.
On January 10, 2020, President of the People’s Republic of China, Mr. Xi Jinping presented awards to Yikang Medical, Fujian University of Traditional Chinese Medicine, Hong Kong Polytechnic University and other units on the project of key technology and clinical application of integrated traditional Chinese and Western medicine rehabilitation for post-stroke dysfunction in the Great Hall of the People.
Yikang Medical remains true to the original aspiration, always bears in mind its responsibility as a leading enterprise in intelligent rehabilitation, and undertakes three national key R&D projects in ”Proactive Health and Aging Technology Response” special project, which include vocalization and speech dysfunction rehabilitation training system, limb motor dysfunction rehabilitation training system and human spinal cord injury robot.

Read more:
The Necessity of Early Hand Rehabilitation
Hand Function Training & Evaluation System
Post time: Jun-21-2022